Descripción funcional del Manipulador Para La Línea Automática de Decapado de Túnel
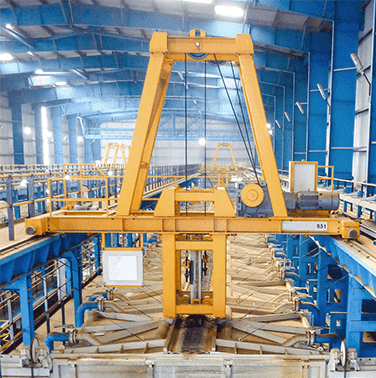
Los manipuladores se utilizan para transportar automáticamente bobinas de alambre entre los baños de decapado individuales, los baños de enjuague y los lugares de almacenamiento.
Cada manipulador está compuesto por un chasis nivelado, una viga de elevación y un marco de rodillos guía. La viga de elevación se revuelve permanentemente entre el bastidor de elevación y el rodillo guía utilizando dos cables de alambre. La altura del punto de alambre fijo articulado se puede ajustar y reajustar.
Las fuerzas que surgen al levantar y bajar la carga y el recorrido del manipulador se conducen a través de los rodillos guía correspondientes en la construcción del marco de acero circundante.
El diseño muy robusto de los rodillos guía tiene rodamientos de rodillos y no requiere mantenimiento (lubricado de por vida); la configuración de la viga móvil es infinitamente variable a través de pernos excéntricos, se utilizan juegos de sujeción internos autocentrantes para fijarlos.
Un rastrillo de acero inoxidable se fija al marco del rodillo guía inferior por medio de un soporte de tornillo.
El rastrillo tiene el contorno de un quitanieves en ambos lados y sirve para enderezar suavemente los cepillos de sellado en la ranura del túnel cuando se manipula en ambas direcciones, que se bajan inmediatamente después del paso y sellan la ranura del túnel contra la liberación de los vapores de decapado. Sin el rastrillo, la barra de elevación de barrido con su contorno rectangular causaría que los cepillos se desgasten después de un corto tiempo.
Los soportes del chasis están conectados con el brazo manipulador a través de conexiones atornilladas de alta resistencia. El soporte del chasis en el lado de la cadena de energía está equipado con rodillos de guía que conducen el manipulador limpiamente en línea recta sobre el riel de la grúa.
La construcción de la rueda de la grúa (diámetro de la rueda de la grúa de 250 mm) está hecha de bloques de rueda libres de mantenimiento que están empotrados en el conjunto de la cabeza a través de conexiones de perno.
El lado de la transmisión de los bloques de las ruedas está equipado con un casquillo estriado: la conexión a la transmisión de largo recorrido se realiza a través del cierre del formulario.
El accionamiento está unido a la construcción de acero a través de una cuchilla de soporte de torque. Toda la unidad del motor del mecanismo de elevación se asienta en un marco mecanizado mecánicamente dentro del manipulador; fijación mediante robustas conexiones atornilladas.
Dos tambores de cable que se utilizan para levantar el cable de elevación están montados en cojinetes en voladizo en ambos ejes de transmisión. El tambor del cable está conectado elásticamente en el lado de la pasarela a través de una campana de cojinete correspondiente a través de una brida de accionamiento con el interruptor de límite del accionamiento. El interruptor de accionamiento limita los puntos de elevación más altos y más bajos y también incorpora las funciones de parada de emergencia.
Los soportes del tambor de cable en el techo de la viga de elevación se hacen usando celdas de carga de pasador de seguridad que están conectadas con el evaluador en las cajas de terminales en el puente de la grúa. Una unidad de protección de sobrecarga programable protege el sistema de sobrecargas; una protección de cable flojo programable de la misma manera detecta una viga de elevación accidental.
Las colisiones entre dos manipuladores adyacentes se evitan mediante el uso de barreras de luz refleja con un máximo. alcance de hasta 8m. Si se realizan aproximaciones fuera del control de programa permitido (mal funcionamiento), las unidades de viaje se desconectan.
Un interruptor de palanca universal de desplazamiento conjunto se encarga de detener previamente el recorrido del manipulador desde la posición final de la sala (bock de amortiguación). Un pin de interruptor correspondiente está unido a la vía de la grúa en el sitio de construcción. Eso mantiene al mínimo cualquier posible fuerza de colisión en la construcción del amortiguador.
La detección de centrado del baño se implementa a través de un sensor inductivo ajustable que se desplaza conjuntamente. La detección se realiza lateralmente a la vía de la grúa a través del interruptor de destino que se colocará debajo del sitio de construcción.
Certificado de trabajo
Fabricante: AXXIA GmbH, Kran-u.Anlagentechnik
N ° de serie: 07-6082/1
Año de fabricación: 2007
Designación: manipulador para línea de decapado de túnel
Tipo de cangrejo: polipasto monocarril Co. ABUS
Clase de elevación: (DIN 15018): H 3
Grupo de tensión (DIN 15018): B 4
Grupo de mecanismos: (FEM / DIN 15020): 3 m
SWL de la grúa: (t): 9.5
Camino de gancho eff .: (m): 3,7
Span: grúa: (mm): 6,000
Rueda- : Grúa: (mm): 250
Número de ruedas: Grúa: 4
Control: SPS
Tensión de alimentación: (Volt): 400 VAC
Tensión de control: (Volt): 24 Frecuencia: (Hz[c/s]): 50







